

How Egocentric Data Fixes Robot Perception
Egocentric datasets train robots using first-person vision, aligning perception with action. By capturing real hand object interactions, they reduce perception action mismatch and enable more reliable robot manipulation and learning.


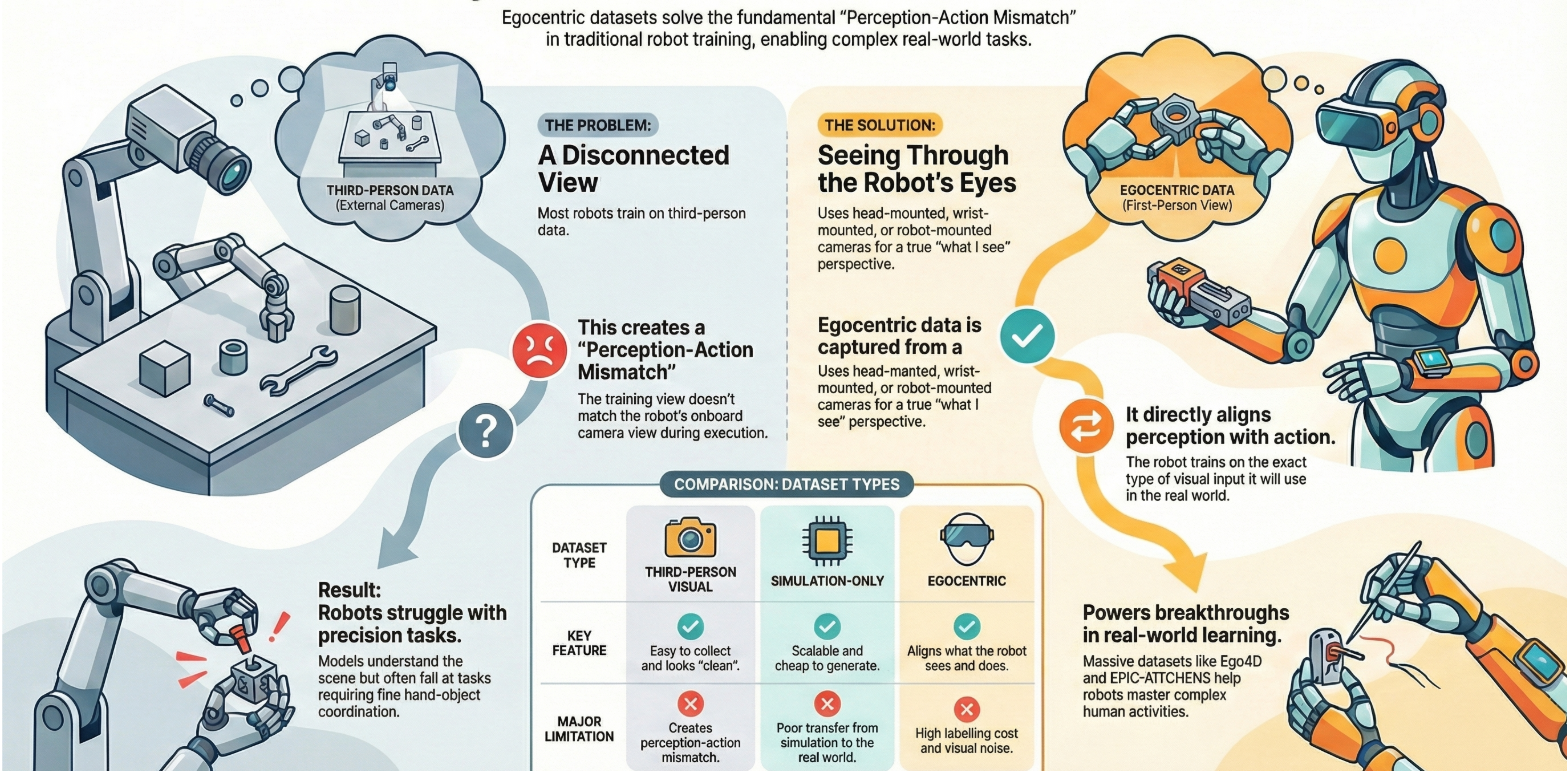
Imagine training a robot to pick up a cup while watching the task from a corner of the room. The camera sees the robot, the table, and the object clearly but this is not how the robot will ever see the world while acting.
Most robot datasets rely on third-person views, captured from overhead or side cameras. These views look clean, but they hide critical details like contact points, hand motion, and fine-grained interactions. When deployed, the robot’s onboard camera sees something entirely different, causing a clear perception action mismatch.
This gap becomes a major problem in manipulation tasks where success depends on precise hand object coordination. Models trained on third-person data often understand the scene but fail during execution.
Egocentric datasets solve this by learning from a first-person perspective using head-mounted, wrist-mounted, or robot-mounted cameras. The robot is trained on the same visual input it will use in the real world, making learning more aligned and effective.
What is egocentric dataset?
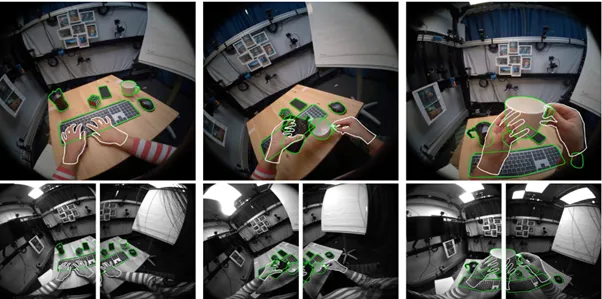
Egocentric view of hand–object interaction
Egocentric datasets capture the world from the actor’s point of view, using head-mounted, wrist-mounted, or robot-mounted cameras. Instead of observing actions from the outside, the data records exactly what the human or robot sees while performing a task.
Because vision and action are aligned, egocentric data is especially effective for learning manipulation, imitation, and fine-grained interactions where perspective and motion matter.
Why Robots Need a First-Person View ?
From third-person views to egocentric robot learning
Robots perceive the world through onboard sensors, not external cameras. When training data comes from third-person views, the robot learns from a perspective it will never use during execution.
This mismatch breaks the link between perception and action. Important details like contact points, hand motion, and depth cues are often lost or distorted.
A first-person view keeps training and deployment aligned. The robot learns actions from the same visual input it relies on in real-world operation.
This alignment leads to more stable behavior. Robots generalize better, fail less during execution, and perform manipulation tasks more reliably.
How Egocentric Datasets Are Collected
.webp)
Egocentric multimodal data collection
· Wearable Cameras: Head-mounted or chest-mounted cameras record tasks from the demonstrator’s natural viewpoint. This captures realistic motion and hand–object interactions during task execution.
· Lab-Based Eye Tracking: Eye-tracking systems are used in controlled lab setups to capture gaze along with first-person video. This helps model visual attention and decision-making during manipulation tasks.
· Controlled Environments: Data is collected in structured settings where lighting and object placement are fixed. This reduces noise and improves consistency across demonstrations.
· Task-Specific Scenarios: Egocentric data is often recorded for predefined tasks like assembly or tool use. This allows precise action labeling and more effective robot learning.
key Egocentric Datasets Examples Used in Robotics & Vision
Egocentric datasets vary based on task focus, sensor setup, and application domain. Below are widely used first-person datasets that support learning human actions, manipulation, and robot perception from an actor’s viewpoint.
1. Egocentric-10K Large-Scale Manipulation Data for Robots
Released by Build AI, Egocentric-10K is a large-scale first-person video dataset collected in real factory environments. It contains around 10,000 hours of video (about 1.08 billion frames) captured using monocular head-mounted cameras.
All videos are recorded at 1080p resolution and 30 fps, with a wide 128° field of view. This setup provides high-quality visual data for training robots on real-world manipulation tasks.
Egocentric-10K provides per-worker calibrated camera intrinsics, stored in intrinsics.json. The cameras follow the OpenCV fisheye (Kannala–Brandt equidistant) model with four distortion coefficients, calibrated at 1920×1080 resolution. These parameters support accurate geometry-aware perception and reconstruction tasks.
{
"model": "fisheye",
"image_width": 1920,
"image_height": 1080,
"fx": 1030.59,
"fy": 1032.82,
"cx": 966.69,
"cy": 539.69,
"k1": -0.1166,
"k2": -0.0236,
"k3": 0.0694,
"k4": -0.0463
}
These calibrated parameters make the dataset suitable for robot manipulation, visual odometry, and 3D-aware learning without additional camera calibration steps.
Loading the Dataset (Streaming)
the Egocentric-10K dataset supports streaming-based access, which allows you to utilize large-scale video data without requiring a full local download. This approach optimizes efficiency by enabling the selective loading of specific factories or workers, significantly reducing storage and memory overhead.
For the implementation code, please refer to the link
2. Ego4D First-Person Daily Activity Videos
Ego4D is a large-scale egocentric video dataset collected using wearable cameras. It captures everyday human activities from a first-person perspective in real-world environments.
The dataset contains over 3,670 hours of video spanning hundreds of scenarios. The data is recorded from hundreds of participants across multiple countries.
Ego4D is one of the largest general-purpose egocentric datasets available. It is widely used for perception, action understanding, and human object interaction research.
3. EPIC-KITCHENS Fine-Grained Egocentric Manipulation
An influential egocentric dataset focused on cooking activities in home kitchens. It was first collected in 2018, with a larger edition released in 2020. The dataset contains millions of frames of first-person video with fine-grained action annotations.
Actions are labeled using noun verb pairs, such as open fridge and cut apple. EPIC-KITCHENS is widely used to train and evaluate models for action recognition and object interaction in realistic household environments.
4. HD-EPIC High Detail Egocentric Video Dataset
A high-detail extension of EPIC-KITCHENS that offers richer annotations for each video. The dataset includes about 41 hours of cooking footage with exhaustive labels covering recipe steps, actions, ingredients, audio, and gaze.
All annotations are grounded in 3D using digital replicas of each kitchen. This makes HD-EPIC a strong resource for egocentric 3D perception and multimodal learning. The dataset sets a new standard for annotation detail in first-person video datasets.
5. RoboSense Multimodal Egocentric Robot Perception
A large-scale multimodal dataset designed for egocentric robot perception and navigation. It includes around 133,000 synchronized frames collected from a mobile robot equipped with multiple sensors.
The robot uses RGB cameras, fisheye cameras for 360° views, and LiDAR sensors. Data is collected in crowded and unstructured environments to reflect real-world navigation conditions.
RoboSense provides 1.4 million 3D bounding box annotations covering objects and obstacles around the robot.
Comparison with other types of Robots Learning Dataset
While egocentric datasets are a strong choice for learning actions, several other dataset types are still widely used that offer different features and trade-offs. Here’s a brief comparison to help you understand where egocentric stands:
1. Third-Person Visual Datasets
Captured from external cameras, these datasets are easy to collect. However, the training view rarely matches what the robot sees during execution, causing poor transfer in manipulation tasks.
2. State-Based and Sensor-Only Datasets
This data focuses on joint states and forces without visual context. It enables precise control but lacks environmental understanding and generalization.
3. Simulation-Only Datasets
Simulation data scales well and is cheap to generate. Still, the gap between simulated and real-world physics and visuals limits real deployment.
Limitations and Challenges of Egocentric Datasets
Egocentric datasets are powerful, but they come with non-trivial challenges that affect scalability and quality.
1. High labelling cost is a major issue. Egocentric data often requires fine-grained, time-aligned annotations of actions, which are expensive and slow to produce.
2. Visual noise and occlusion are common. Fast head or hand motion introduces blur, and objects are frequently blocked by hands, reducing visual clarity.
3. Hardware and setup constraints also limit data collection. Wearable or robot-mounted cameras can be intrusive, misaligned, or inconsistent across demonstrations.
4. Bias and limited diversity can emerge when data is collected from a small group of demonstrators or environments, reducing generalization to unseen tasks.
Conclusion
As robots move closer to real-world deployment, the limitations of traditional datasets become increasingly clear. Learning actions from external viewpoints often breaks the connection between perception and execution, especially in manipulation-heavy tasks.
Egocentric datasets address this gap by aligning what the model sees with how actions are performed. By capturing fine-grained interactions from a first-person perspective, they provide a balanced foundation for imitation learning, scalable robot training, and future foundation models in robotics.
FAQs
What is an egocentric dataset in robotics?
Egocentric datasets capture visual data from a first-person perspective, aligning what the robot sees during training with how it acts in the real world.
Why are egocentric datasets better than third-person data for manipulation?
They preserve hand–object contact, motion cues, and depth from the actor’s viewpoint, reducing perception–action mismatch during execution.
Are egocentric datasets only useful for imitation learning?
No. They are also used for robot manipulation, action recognition, visual odometry, and training foundation models for embodied AI.

Simplify Your Data Annotation Workflow With Proven Strategies
.png)
