

NVIDIA Isaac GR00T N1 Foundation Model For Humanoid Robots
Isaac GR00T N1—from NVIDIA—is an open foundation model and simulation toolkit enabling powerful reasoning, multistep manipulation, and cross-embodiment skills for humanoid robots. Modular, simulation-powered, and scalable for rapid AI robot development


Imagine a humanoid robot standing in a cluttered kitchen. The real challenge isn't its metal frame, but the AI brain inside, trying to make sense of the chaos.
For years, this has been the central problem in robotics: how do you create a generalist robot that can adapt to any task, just like a human?
Most robotics AI models are trained for one specific job. A model that's great at welding car parts is useless at folding laundry. This creates "data islands"—valuable but isolated knowledge that doesn't transfer.
Now, NVIDIA has revealed an ambitious goal: to create a single, open foundation model to serve as a universal "brain" for humanoid robots everywhere. This is Project GR00T.
Introducing GR00T N1: The World's First Open Humanoid Foundation Model
At its GTC conference, NVIDIA announced Isaac GR00T N1, the first in a family of fully customizable foundation models for humanoid robots.
By making it an open model, NVIDIA aims to accelerate the entire robotics industry, providing a powerful starting point for developers everywhere.
So, what is a foundation model for robots? Think of it like giving every robot a pre-trained base of knowledge about the world.
It understands physics, objects, and human actions right out of the box. Developers can then take this powerful "brain" and fine-tune it for their specific jobs, saving immense amounts of time and resources.
As NVIDIA CEO Jensen Huang declared, "The age of generalist robotics is here." GR00T N1 is the key to unlocking this new era.
The Architecture of GR00T N1
GR00T N1's design is inspired by human cognition, using a "dual-system" approach to think and act.
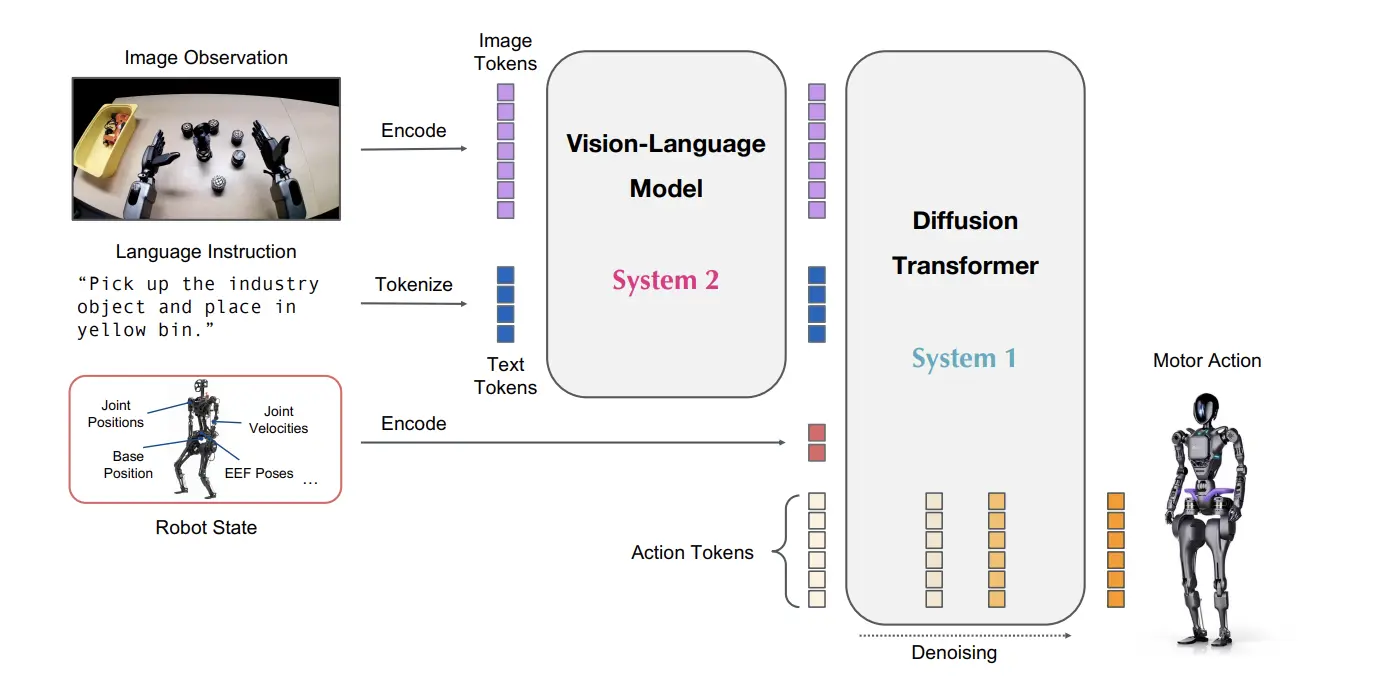
Nvidia Groot N1 Architecture
- System 2 (The Thinker): This is the "slow-thinking," deliberate part of the brain. It's a pre-trained Vision-Language Model (VLM)—specifically, a version of NVIDIA's Eagle-2 VLM. It processes images from the robot's cameras and language instructions from a human, running at 10Hz to analyze the environment and decide what to do.
- System 1 (The Doer): This is the "fast-thinking" action model, like our reflexes. It's a Diffusion Transformer (DiT) that takes the high-level plan from System 2 and generates precise, high-frequency (120Hz) motor commands to execute the task smoothly.
These two systems are "tightly coupled." The DiT constantly cross-attends to the VLM's output, ensuring the robot's physical actions are perfectly aligned with its understanding of the task. This integrated design is a major leap from older robotics systems, which were often brittle and slow.
To support different robot bodies, the architecture uses embodiment-specific encoders and decoders. These small neural networks (MLPs) translate sensor data and motor commands for different body parts, allowing one core model to control various humanoid forms.
The "Data Pyramid"

Data Pyramid
Real-world robot data is rare and expensive to collect. To solve this, NVIDIA developed the "data pyramid," a structured approach to training.
- Base Layer (Broad Knowledge): At the bottom is a massive amount of web-scale data and human videos (like from YouTube). NVIDIA uses technology like FLARE to teach the model a broad understanding of the physical world and human actions.
- Middle Layer (Synthetic Reality): The next layer consists of huge volumes of synthetic data generated in simulation. Tools like NVIDIA Isaac Sim, Omniverse, and the new Newton physics engine create realistic virtual worlds for the robot to train in.
- Top Layer (Real-World Grounding): At the very top is a smaller, highly valuable set of real-world robot demonstration data. This grounds all the learned knowledge in reality, ensuring the model's skills transfer to the physical world.
This strategy allows GR00T N1 to learn robustly and generalize to new tasks, even with a limited amount of real-world data.
GR00T in Action
At the GTC keynote, NVIDIA showcased the power of GR00T N1. A 1X NEO humanoid robot, post-trained on the model, autonomously performed complex tidying tasks.
It demonstrated a range of generalist skills, including grasping objects, moving them with one or both arms, and transferring items between its hands.
These abilities are directly applicable to industrial use cases like material handling, packaging, and inspection.
The Ecosystem: It Takes a Village to Raise a Robot
NVIDIA isn't building this future alone. The GR00T project is powered by key collaborations:
- Google DeepMind: Co-developing the Newton physics engine and MuJoCo-Warp, which can accelerate robotics simulation workloads by over 70x.
- Disney Research: Using Newton to power their next-generation expressive robotic characters, like the BDX droids seen on the GTC stage.
- Humanoid Developers: Early access partners include industry leaders like Agility Robotics, Boston Dynamics, 1X, Mentee Robotics, and NEURA Robotics.
NVIDIA is also working with Disney and Intrinsic to build OpenUSD pipelines to standardize robotics data workflows, making it easier for everyone to collaborate.
How to Get Started with GR00T N1: A Guide for Developers
Because GR00T N1 is an open model, developers can start working with it right away.
- Hugging Face: The GR00T N1 models and the PhysicalAI-Robotics Dataset are available for download.
- GitHub: The official NVIDIA/Isaac-GR00T repository contains all the necessary code and implementation details.
The developer workflow is straightforward:
- Download: Get the pre-trained model and datasets.
- Post-Train: Fine-tune the model for your specific robot and tasks.
- Generate More Data: Use the Isaac GR00T Blueprint to create massive amounts of synthetic data from just a few human demonstrations, which can improve performance by up to 40%.
- Deploy: Use turnkey systems like the NVIDIA DGX Spark personal AI supercomputer for development.
The Future of Generalist Robotics
GR00T N1 is just the first in a family of models. NVIDIA plans to release more advanced versions with improved reasoning, more complex skills, and support for even more robot bodies.
This technology has the potential to address global labor shortages and transform industries from manufacturing to healthcare.
The GR00T Awakening is not the end of the journey; it is the beginning of an open, collaborative effort to build the future of robotics.
With this powerful foundation model, NVIDIA is providing the "brain" for a new generation of intelligent, adaptable humanoid robots that will soon walk among us.
FAQs
What is NVIDIA Isaac GR00T N1?
Isaac GR00T N1 is an open, generalist foundation model and toolkit from NVIDIA, designed to enable rapid training and deployment of humanoid robot reasoning and motor skills using real or synthetic data.
How does Isaac GR00T N1 improve robot development?
GR00T N1 combines a dual-system brain (fast reflex and slow reasoning), high-fidelity simulation, and synthetic data pipelines, making it easier to build adaptive robots for real-world, multi-step tasks.
Can GR00T N1 be used across different robots?
Yes—GR00T N1 is cross-embodiment and can be post-trained and adapted to control a variety of humanoid platforms, from research prototypes to industrial bots, minimizing custom code.
Where can developers find Isaac GR00T N1 resources?
Open-source models, data, benchmarks, and blueprints are available on GitHub, Hugging Face, and linked academic repositories, supporting both R&D and production use.
What are practical applications for Isaac GR00T N1?
Typical uses include material handling, logistics, inspection, and household tasks—any scenario requiring humanoids to generalize, reason, and perform composite manipulations.
References

Simplify Your Data Annotation Workflow With Proven Strategies
.png)
